
Mobility and independence are very important. The Triton family of feet are designed for highly active users; a selection of prosthetic feet are available that are reliable in any situation. Mobility at the highest level, for enhanced quality of life.
As diverse as the Triton family is, all of the products feature the innovative triangular spring system. This design is modelled after the human foot. The result is an especially natural, harmonious gait pattern. From heel strike to the stance phase to pushing off for the next step.
The Human Foot
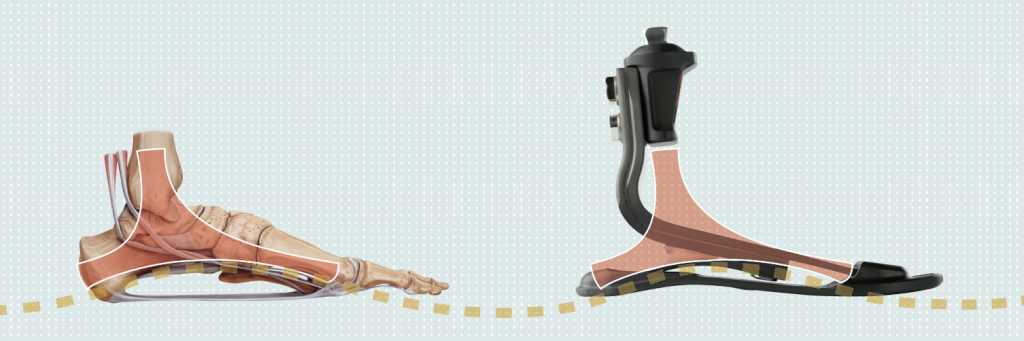
In the human foot, the flexible forefoot structure is connected to the supporting heel via the plantar fascia (aponeurosis). The interplay between the different muscles and tendons thus controls the movement of the foot. When you put weight on your heel, during rollover or when pushing off with your toes, there is a harmonious flow of force throughout your entire foot unit.
The Triton Foot
The anatomy of the natural foot is reflected in the characteris- tic, curved, triangular form of the Triton prosthetic feet. They are comprised of three interconnected spring elements. A car- bon forefoot spring and a two-part carbon heel spring form the load-bearing structure. The high-performance polymer base spring in turn connects these elements to form an integrated unit and provide for a particularly smooth rollover.
• Pyramid Adapter made of lightweight aluminum or titanium
• Carbon Forefoot Spring - The split forefoot spring allows the foot to adapt to uneven surfaces. It offers high energy return, stability and control at rollover and toe-off
• Base Spring - The high-performance polyester split base spring has a separate big toe, and connects the forefoot and the heel spring to form a complete unit
• Carbon Attachment Spring - The attachment spring made of carbon fibre material gives the foot the required stability
• Carbon Heel Spring - The heel spring dampens the impact at heel strike and stores the energy for a smooth rollover
• Replaceable Heel Wedge - The optional heel wedges provide a simple method for adapting the Triton to the individual needs of the patient
Triton 1C60

The full size Triton 1C60 foot provides the most energy return, but the overall build height may limit its usability in some situations.
Triton 1C63

The Low-Profile Triton 1C63 foot combines the outstanding dynamic response and flexibility of the Triton with a considerably reduced structural height. The titanium adapter makes the foot extremely resilient as well as water-resistant.
Triton 1C64

The Triton HD (Heavy Duty) 1C64 version offers a higher load limit for highly active users and is also water-resistant. The foot is recommended for particularly challenging conditions - at work or play.


![]()
